Feldgemüsebau: Roboter im Einsatz

Immer mehr Firmen beschäftigen sich mit der Entwicklung von Robotern für den Feldgemüsebau. Erste Erfahrungen mit Zuckerrüben konnten in der Innovation Farm in Wieselburg gesammelt werden. Die folgenden Aussagen können auch auf Feldgemüse übertragen werden.
Aktuell gibt es in Europa mehr als 30 Firmen, die Roboter für den Feldgemüsebau entwickeln. Einige wenige bieten auch schon Roboter kommerziell für den praktischen Einsatz an. Betriebsführer müssen jedenfalls einige betriebs- und arbeitswirtschaftliche Fragestellungen vor einem Kauf berücksichtigen.
Kosten und Leistungen
Die Anschaffungskosten der am Markt angebotenen Feldroboter schwanken stark. Aktuell sind Maschinen zwischen 20.000 und 200.000 Euro ohne Mehrwertsteuer verfügbar. Die Bedienung der Roboter muss erlernt werden. Deshalb ist bei der Anschaffung zu klären, welche Unterstützung in den Anschaffungskosten enthalten ist. Empfehlenswert ist eine Einschulung am Feld und eine Hotline für Fragen und Fernwartung, die auch nach der Einschulung während der Saison auch außerhalb der normalen Bürozeiten zur Verfügung steht.
Da die Software von Roboter laufend weiterentwickelt wird, ist beim Kauf festzuhalten, in welchem Umfang Updates im Kaufpreis enthalten sind. Hersteller, die Roboter nicht verkaufen, sondern nur vermieten, werben damit, dass dadurch die Roboter immer am aktuellen Stand sind.
Roboter sind in der Regel mit der Datenplattform des Anbieters verbunden. Über diese werden Fehlermeldungen an die Bedienperson gesandt beziehungsweise kann sie die Arbeit des Roboters überwachen. Eine eventuelle Fernwartung durch den Hersteller wird ebenfalls darüber durchgeführt. Bei der Anschaffung ist zu klären, welche Kosten für das mobile Internet und die Nutzung der Datenplattform anfallen. Sind sie für einen bestimmten Zeitraum im Anschaffungspreis enthalten oder fallen jährlich Gebühren an? Weitere wichtige Fragen sind, ob der Roboter auch ohne Verbindung zur Datenplattform arbeiten kann, welche Nutzungsrechte räumt sich der Roboterhersteller an den Daten ein oder können vom Roboter erfasste Daten für die eigene Betriebsführung exportiert werden?
Die meisten Roboter benötigen für die Navigation RTK-GNSS – eine Technik, die Positionsmessungen verbessert. Wenn das in Österreich verfügbare APOS-Korrektursignal genutzt werden kann, fallen nur Kosten für die erforderliche SIM-Karte an. Ansonsten muss auch mit Signalkosten gerechnet werden.
Kosten pro Hektar
Neben den Anschaffungskosten ist die technische Lebensdauer entscheidend für die Kosten pro Einsatzstunde beziehungsweise Hektar. Auf Grund der Neuheit der Roboter gibt es dazu noch wenig Erfahrungen, was zu erhöhter Unsicherheit bei Kostenkalkulationen führt.
Für die Kosten pro Hektar sind Leistungsfähigkeit und das Einsatzspektrum bezüglich Kulturen und Arbeitsgängen entscheidend. Auf Grund sicherheitstechnischer Vorgaben für das teilautonome Arbeiten liegt die Arbeitsgeschwindigkeit der Roboter häufig unter einem Kilometer pro Stunde. Dies führt bei einer Arbeitsbreite von drei Metern zu Flächenleistungen von unter 0,2 Hektar pro Stunde.
Damit eine entsprechende jährliche Flächenleistung erreicht wird, müssen die verfügbaren Feldarbeitsspannen der einzelnen Kulturen und Arbeitsgänge durch autonomes Arbeiten in der Freizeit der Bedienperson optimal ausgenützt werden. Bei der Wahl der Kulturen müssen die Feldarbeitsspannen abgestimmt werden, um hohe jährliche Auslastungen zu erreichen. Hohe jährliche Auslastungen sind besonders schwierig zu erreichen, wenn der Roboter auf einen Arbeitsgang wie beispielweise das Hacken in der Reihe einer einzigen Kultur spezialisiert ist. Dies ist oft bei kameragesteuerten Hackrobotern der Fall. Roboter, die bei der Saat den Ablagepunkt des Saatgutes über RTK-GNSS aufzeichnen und auf Basis dieses Vorwissens in der Reihe hacken, sind in diesem Zusammenhang von Vorteil, besonders wenn die Säeinheit verschiedene Kulturen mit stark abweichenden Feldarbeitsspannen säen kann.
Schlagwechsel planen
Feldroboter dürfen unter den heutigen technischen und verkehrsrechtlichen Rahmenbedingungen noch nicht autonom auf öffentlichen Straßen den Schlag wechseln. Deshalb muss der Überstellungsvorgang zeiteffizient gestaltet sein. Dies ist von umso größerer Bedeutung je kleiner die Schläge sind. Der Schlagwechsel kann auch zu erheblichen Stehzeiten des Roboters führen, wenn er außerhalb der Dienstzeit der Bedienperson fällt. Mit erheblichem Zeitaufwand kann auch das Eingeben der Schlaggrenzen verbunden sein. Dies ist besonders dann der Fall, wenn die mögliche Fahrgeschwindigkeit unter einem Kilometer pro Stunde liegt und die Bedienperson für die erste Umfahrt nebenher mitgehen muss. Wichtig ist in diesem Zusammenhang auch, dass die Schlaggrenzen abgespeichert werden können und nicht bei der nächsten Überfahrt neu aufgenommen werden müssen.
Nicht alle am Markt befindlichen Roboter können Reihen am Vorgewende, Hindernisse wie zum Beispiel Brunnen oder nicht rechteckige Schläge bei der Fahrspurplanung automatisch berücksichtigen. Dies kann zu einem erheblichen Zeitaufwand vor der eigentlichen Arbeitsverrichtung durch den Roboter führen.
Richtig einstellen
Alle Roboter müssen am Beginn der Arbeit sorgfältig eingestellt werden. Dies ist auch mit einem entsprechenden Zeitaufwand verbunden. Webplattformen zur Kontrolle der Arbeitsqualität und des Arbeitsfortschrittes beziehungsweise zur Übermittlung von Störungsmeldungen helfen, den Zeitbedarf für Kontrollen des Roboters zu minimieren. Soll der Roboter rund um die Uhr arbeiten, muss für die unmittelbare Behebung von Störungen auch eine Bedienperson in Bereitschaft sein.
Weniger Handarbeit
Erste Untersuchungen bei der Saat und Beikrautregulierung haben gezeigt, dass der Arbeitszeitbedarf für die Betreuung des Roboters höher sein kann als die Arbeitserledigung mit einer leistungsfähigen Traktormechanisierung. Zeitersparnis ist vor allem durch die Reduktion der Handarbeit in Folge des Hackens in der Reihe durch den Roboter erzielbar. Die Reduktion der Handarbeit führt meist auch zu geringeren Arbeitserledigungskosten durch den Robotereinsatz. Ein Beispiel hierfür ist in der Abbildung dargestellt.
Es werden die Arbeitserledigungskosten für Aussaat, viermal maschinelles Hacken und Handhacke bei herkömmlicher sechsreihiger Traktormechanisierung und einem sechsreihig arbeitenden Roboter verglichen. Der Reihenabstand beträgt 45 cm.
Die Arbeitserledigungskosten der Traktormechanisierung sind als Fläche im Hintergrund dargestellt. Wobei ein Arbeitszeitbedarf für die Handhacke von 200 Arbeitskraftstunden (AKh) pro Hektar zu 13,50 Euro pro Hektar unterstellt sind. Die Säulen im Vordergrund geben die Arbeitserledigungskosten für den Robotereinsatz bei unterschiedlicher Arbeitszeiteinsparung für die Handhacke durch den Roboter wieder. Der Roboter kann 20 Hektar säen und diese auch viermal hacken. Er kostet 80.000 Euro in der Anschaffung. Die Lohnkosten der Roboter- und Traktorbedienperson betragen 26 Euro pro Hektar.
Die teilautonome Arbeitsweise kann die hohen Maschinenkosten des Roboters sowohl bei fünf- als auch bei zehnjähriger Nutzungsdauer des Roboters nicht ausgleichen. Dadurch sind die Arbeitserledigungskosten für das Säen und Hacken deutlich höher als bei der Traktormechanisierung. Da der Roboter auch in der Reihe hacken kann, wird die Handarbeit reduziert. Im vorliegenden Beispiel muss der Handarbeitseinsatz bei zehnjähriger Nutzung des Roboters um zehn Prozent (20 AKh) und bei fünfjähriger Nutzung um 28 Prozent (56 AKh) reduziert werden.
Autoren: DI Franz Handler und Moritz Jungwirth, HBLFA Francisco Josephinum
Der Artikel ist erschienen in der BIO AUSTRIA Zeitung, Ausgabe 2/2022
Arbeitserledigungskosten für Saat und viermaliges Hacken
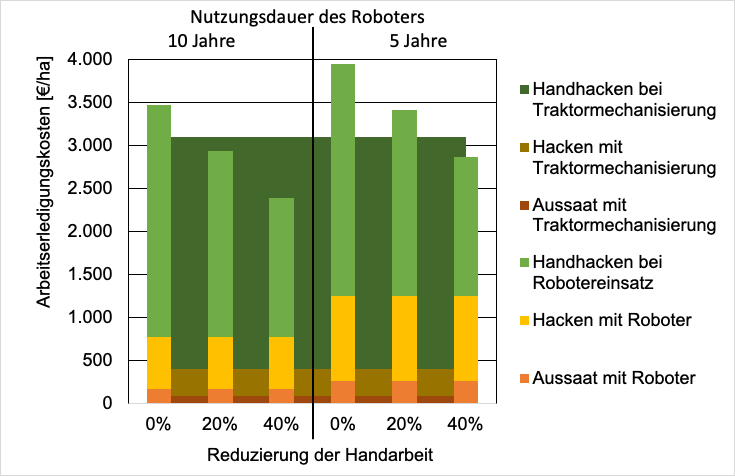
Quelle: DI Franz Handler, HBLFA Francisco Josephinum